
उत्पादनहरू
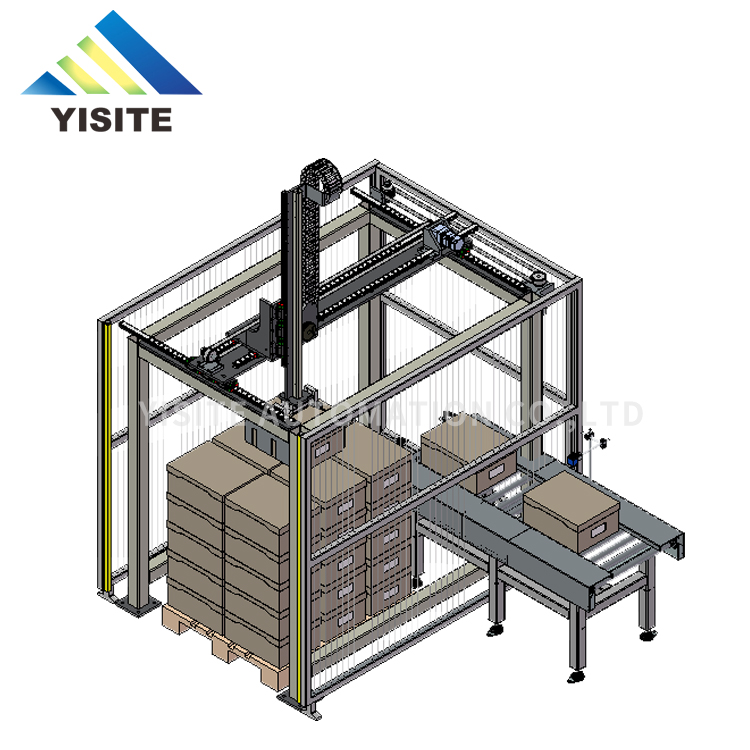

कार्टन बक्स गैन्ट्री अटो प्यालेटाइजर
छोटो विवरण:
कार्टन बक्स ग्यान्ट्री अटो प्यालेटाइजर उत्पादन परिचय: प्यालेटाइजरको मुख्य एकाइ ट्रलीबाट बनेको हुन्छ जुन अगाडि र पछाडि यात्रा गर्न सकिन्छ, फ्रेम, र एक क्यारियर प्लेटफर्म जसलाई माथि र तल उठाउन सकिन्छ। आकार र फिक्स्चर अनुकूलित गर्न सकिन्छ।
कार्टन बक्स ग्यान्ट्री अटो प्यालेटाइजर वायवीय ग्रिपको विशेष डिजाइन, समायोज्य दबाब, प्रेशर बफर भल्भले सुसज्जित छ, ताकि इन्डक्सन मेकानिज्मले सुसज्जित ग्रास कार्यले वस्तुलाई स्वचालित रूपमा बुझ्न सक्छ, र वस्तु ग्रासको लागि नियन्त्रण केन्द्रलाई सूचित गर्न सक्छ।

हाम्रो बारेमा

हामी एक पेशेवर अनुकूलित स्वचालन उपकरण निर्माता हो। हाम्रा उत्पादनहरूमा डिपलेटाइजर, पिक एण्ड प्लेस प्याकिङ मेसिन, प्यालेटाइजर, रोबोट एकीकरण अनुप्रयोग, लोडिङ र अनलोडिङ म्यानिपुलेटर्स, कार्टन फर्मिङ, कार्टन सिलिङ्ग, प्यालेट डिस्पेन्सर, र्यापिङ मेसिन र ब्याक-एन्ड प्याकेजिङ उत्पादन लाइनका लागि अन्य स्वचालन समाधानहरू समावेश छन्।
हाम्रो कारखाना क्षेत्र लगभग 3,500 वर्ग मीटर छ। कोर प्राविधिक टोलीसँग 2 मेकानिकल डिजाइन इन्जिनियरहरू सहित मेकानिकल स्वचालनमा 5-10 वर्षको औसत अनुभव छ। 1 प्रोग्रामिङ इन्जिनियर, 8 विधानसभा कार्यकर्ता, 4 बिक्री पछि डिबग गर्ने व्यक्ति, र अन्य 10 कामदारहरू
हाम्रो सिद्धान्त "ग्राहक पहिले, गुणस्तर पहिले, प्रतिष्ठा पहिले" हो, हामी सधैं हाम्रा ग्राहकहरूलाई "उत्पादन क्षमता बढाउन, लागत घटाउन र गुणस्तर सुधार गर्न" मद्दत गर्छौं, हामी मेसिनरी स्वचालन उद्योगमा शीर्ष आपूर्तिकर्ता बन्न प्रयास गर्छौं।
ट्रस XYZ पूर्ण रूपमा स्वचालित कार्टन बोस स्ट्याकिंग म्यानिपुलेटर
1. स्ट्याकर मेसिनको संरचना
प्यालेटाइजिङ मेसिन स्थापना फ्रेम, स्थिति प्रणाली, सर्वो ड्राइभ प्रणाली, नियन्त्रण प्रणाली, विद्युत नियन्त्रण र वितरण प्रणाली, सुरक्षा सुरक्षा उपकरण, आदि, स्वचालित फिड स्थिति प्रणाली संग सुसज्जित छ। (वैकल्पिक स्वचालित स्ट्याक आपूर्ति प्रणाली)
2. स्ट्याकिङ मेसिन माउन्टिङ र्याक
किनभने स्ट्याकरको चाल गति धेरै छिटो छ, सुरु अवस्थाले माउन्टिङ फ्रेममा ठूलो प्रभाव पार्छ। स्ट्याकिङको स्थिर सञ्चालन सुनिश्चित गर्न स्थापना फ्रेम धेरै राम्रो कडा हुनुपर्छ, त्यसैले हामीले वेल्डेड स्टील फ्रेम संरचनाको रूपमा डिजाइन गरेका छौं। समर्थन फ्रेम।
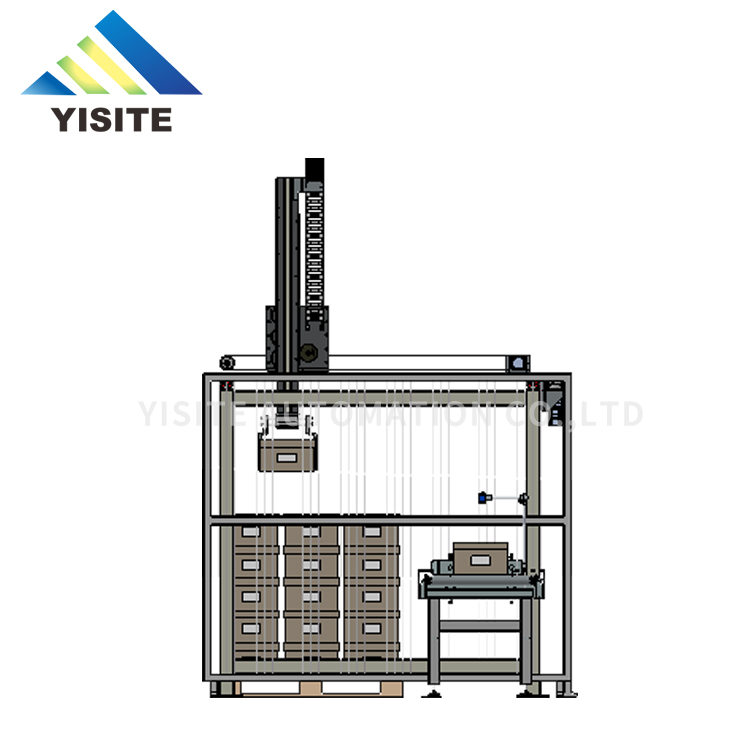
3. स्टेकर प्यालेटाइजर मिसिन स्थिति प्रणाली
स्ट्याकर स्थिति प्रणाली सम्पूर्ण उपकरणको मूल हो, यास्कावा कम्पनी (जापान) को उत्पादन हो, द्रुत गति गति, र पुनरावृत्ति शुद्धता उच्च छ, X, Y, Z तीन समन्वय सिंक्रोनस दाँत बेल्ट प्रसारणको लागि चयन गरिएको छ, एकल समन्वय। दोहोरिने स्थिति निर्धारण शुद्धता 0.1mm, द्रुत रेखा गति गति: 1000 mm/s। X अक्ष 3000mm को एकल लम्बाइ र 1935mm को स्प्यान भएको एकल स्थिति प्रणाली हो। सिंक्रोनस ट्रान्समिटरले दुई पोजिसनिङ सिस्टमहरूको सिंक्रोनस आन्दोलन सुनिश्चित गर्दछ र 1500W सर्वो मोटरद्वारा सञ्चालित हुन्छ। ड्राइभिङ टर्क र जडता मिलाउनको लागि, त्यहाँ उच्च-परिशुद्धता ग्रह गियर रिड्यूसर छ।
दोहोरो स्थिति प्रणाली प्रयोग गरी Y-अक्ष। यति ठूलो क्रस खण्डको साथ पोजिसनिङ एकाइको कारण मुख्यतया Y-अक्ष मध्य निलम्बन संरचना संग एक डबल-अन्त समर्थन हो। यदि चयन गरिएको क्रस सेक्शन पर्याप्त छैन भने, रोबोट आन्दोलनको स्थिरता ग्यारेन्टी हुनेछैन, र उच्च गतिमा हिंड्दा रोबोट काँपनेछ। बीचमा Z-अक्ष क्लिप गर्न र सन्तुलनमा दुई पोजिसनिङ एकाइहरू साथसाथै प्रयोग गरिन्छ। लोड राम्रोसँग। यो स्थापना मोडमा धेरै राम्रो स्थिरता छ। दुई पोजिसनिङ प्रणालीहरू 1500W सर्वो मोटरद्वारा सञ्चालित छन्, ड्राइभ टर्क र जडतालाई मिलाउन उच्च-परिशुद्धता ग्रह गियर रिड्यूसरले सुसज्जित छन्।
Z-अक्ष पोजिसनिङ प्रणाली बलियो र स्थिर छ। उत्पादनमा सामान्यतया स्लाइडर फिक्स हुन्छ र समग्र माथि र तल आन्दोलन हुन्छ। सर्वो मोटरले वस्तुलाई छिटो सुधार गर्न आवश्यक छ, जसले ठूलो गुरुत्वाकर्षण र प्रवेग बललाई पार गर्न आवश्यक छ, र अधिक शक्ति चाहिन्छ। .अभ्यासमा, हामीले 2000W सर्वो मोटर छनोट गर्यौं, उच्च परिशुद्धता ग्रह गियर रिड्यूसरले सुसज्जित। A अक्ष घुमाउने अक्ष हो।
4. सर्वो ड्राइभ प्रणाली
डिजिटल प्रकार्यको साथ सर्वो मोटर प्रयोग गर्ने स्ट्याकिङ मेनिपुलेटर मेसिन। प्रत्येक मोटर शाफ्ट एक सर्वो मोटर र एक रिड्यूसर, चार सर्वो मोटर र चार रिड्यूसर, लक सर्वो मोटर सहित ठाडो मोटर सहित सुसज्जित छ।
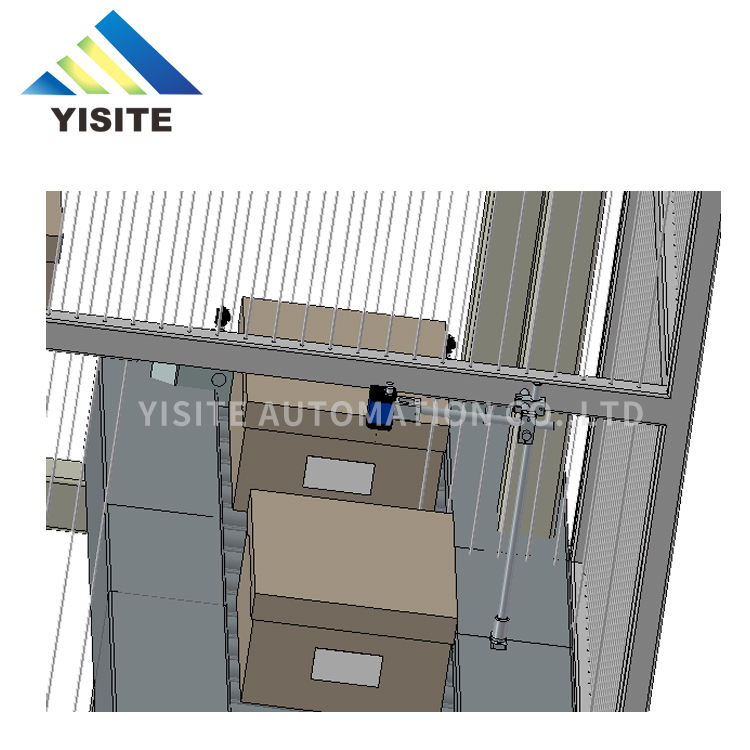
5. स्ट्याकर पकड
वायवीय ग्रिपको विशेष डिजाइनको साथ स्ट्याकिङ, समायोज्य दबाब, दबाब बफर भल्भसँग सुसज्जित, ताकि इन्डक्शन मेकानिज्मसँग सुसज्जित ग्रास कार्यले वस्तुलाई स्वचालित रूपमा बुझ्न सक्छ, र वस्तुको पकडको लागि नियन्त्रण केन्द्रलाई सूचित गर्न सक्छ।
6, नियन्त्रण प्रणाली
नियन्त्रण प्रणालीमा ठूलो पीएलसी र टच स्क्रिन हुन्छ। प्रणालीमा शक्तिशाली प्रोग्रामिङ क्षमताहरू छन्। प्यालेटाइजिङका विभिन्न मोडेलहरूको साथ, प्रणालीले विभिन्न प्रकारका कलाकृति कार्यक्रमहरू प्रिसेट गर्न सक्छ, र सोही कार्यक्रमलाई प्रतिस्थापन गर्न टच स्क्रिनमा सञ्चालन गर्न सकिन्छ।
7, सुरक्षा उपकरण
मेसिनमा फल्ट प्रम्प्ट र अलार्म प्रकार्य छ, र प्रत्येक गल्तीले विशेष स्थानलाई सही रूपमा प्रतिबिम्बित गर्न सक्छ, गल्तीहरू हटाउन सजिलो र द्रुत रूपमा, मुख्य रूपमा समावेश गर्दछ: रोबोट टक्कर सुरक्षा प्रकार्य; ठाउँ पत्ता लगाउन workpiece स्थापना; प्रकाश स्क्रिन सुरक्षा सुरक्षा।
प्राविधिक मापदण्डहरू
1. मेसिन मोडेल: YST-MD1500
2. स्ट्याकिंग क्षमता: 200-500 बक्स / एच
3. फ्रेम: SS41 (A3 स्टील इंजेक्शन प्लास्टिक उपचार) शाफ्ट S45C असर इस्पात
4. पावर: AC, 3 चरण, 380V, 9KW 50HZ
5. हावा खपत: 500NL / MIN (हवा प्रयोग: 5-6kg / cm2)
6. उपकरण आयामहरू: (L) 3500mm (W) 2250mm (H) 2800mm (वास्तविक लेआउट डिजाइनमा निर्भर गर्दछ)
7. उपकरण वजन: 1,500 किलो


मुख्य लाभ कन्फिगरेसन
1. Yaskawa ब्रान्ड सर्वो मोटर
2. ताइवान ब्रान्ड गति रिड्यूसर
3. मित्सुबिशी (जापान) PLC
4. सम्पर्ककर्ता र स्विचहरू Schneider मा प्रयोग गरिनेछ
5. ओमरोन फोटोइलेक्ट्रिक सेन्सर
6. इन्टरफेस नियन्त्रण प्रदर्शन कार्य र अलार्म स्थिति र अलार्म प्रकार्य
7. Yaskawa ब्रान्ड आवृत्ति कनवर्टर
8. फ्रेम र साइड प्यानल कार्बन स्टील द्वारा बनाइन्छ
9. ताइवान AirTac वायवीय तत्वहरू
10. इटालियन PIAB ब्रान्ड Sucker









